Техника и вооружение 2007 03 - Автор неизвестен (читать книги бесплатно txt) 📗
Способ старта заключался в том, ч то с помощью пускового стола, размещенного в шахте, вместе с оболочкой хвостового отсека ракеты создавался «воздушный колокол», что позволяло демпфировать газодинамические процессы при запуске маршевого двигателя но специальной программе ступенчатого выхода двигателя на режим и обеспечивать снижение нагрузок на ракету при стар те до допустимых величин. На пусковом столе устанавливались датчики, контролирующие допустимый уровень воды в нижней части «колокола», при котором был возможен запуск двигателя ракеты.
Безударный выход ракеты при заданной для старта скорости подводной лодки в подводном положении обеспечивался принятой схемой ее движения в шахте. Согласно этой схеме, движение ракеты проходило по двум направляющим, закрепленным на шахте в плоскости, перпендикулярной диаметральной плоскости подводной лодки. На ракете шарнирно закреплялись две пары шарнирных башмаков (бугелей), расположенных в верхней части ракеты и на ее хвостовом отсеке. Нагрузки, действующие на ракету при движении лодки, до выхода первой пары бугелей из направляющих воспринимались корпусом ракеты. После выхода этих бугелей из направляющих при дальнейшем движении ракеты в шах те ракета под действием набегающего потока при движении подводной лодки могла свободно наклоняться на нижней паре бугелей, как на шарнирной оси, перпендикулярной движению лодки. Это снижало нагрузки на ракету при дальнейшем движении в шахте и при имеющихся зазорах между корпусом ракеты и шахтой, что обеспечивало ее безударный выход.
Контроль выхода ракеты из шахты осуществлялся выдачей сигнала датчиком, установленным в верхней части направляющих, после выхода нижней пары бугелей ракеты из шахты. Конструкцию датчика разработали специалисты ЦКБ-34 В.А. Мазиин, Е.Н. Матвеев и В.Н. Филатов. ЦКБ-34 подготовило документацию опытной стартовой установки СМ-85 для испытаний на ПС и передало ее на завод «Большевик» для изготовления. В создании и отработке стартовой установки СМ-85 для стенда от ЦКБ-34 принимали участие Б.Г. Лисичкин, М.Н. Петров, В.В. Козин и другие. Снаружи в верхней части шахты находилась площадка для обслуживания, а в нижней – съемные устройства для отвода вниз или вверх газов стартующей ракеты. На стенде также была смонтирована аппаратура для записи давлений в шахте, перемещений и ускорений стенда при пуске ракет.
Погружаемый стенд для испытательных и бросковых пусков прототипов ракеты С-4 сооружался на заводе №444 (главный строитель В.П. Кожущенко). Готовый стенд отбуксировали па акваторию полигона. Стенд обладал способностью погружаться па глубину 20 м, запас его плавучести в надводном положении составлял около 11 т, положительная плавучесть в погруженном состоянии – около 4 т.
Для сокращения сроков и снижения затрат на изготовление макетов БРПЛ Е.В. Чарнко решил взять для экспериментов за основу доработанную конструкцию Р-11ФМ, чтобы определи ть возможность запуска двигателя ракеты в заполненной водой шахте. О работах, проводимых в то время по созданию ракете подводным стар том, можно судить по воспоминаниям ведущего инженера ОКБ-10 А.Л. Карпушко, ответственного за измерительное и электрическое оборудование.

Начальник отдела ЦКБ-34 Б.Г. Лисичкин

Начальник отдела ЦКБ-34 В А. Мазнин.

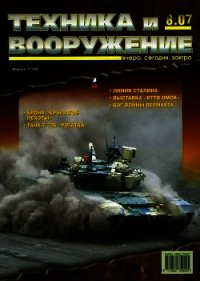
Погружаемый стенд ПС для бросковых испытании макетов С-4.1 и С-4.5. Черное море, 1956-1958 гг.
«И цехе, где собирался первый в мире искусственный спутник Земли, – писал он, – оснащалась и наша ракета подводного старта. С. П. Королев пошел нам навстречу и разрешил силами своего цеха произвести сборочные и электромонтажные работы, а также цеховые испытания изделия. Корпус ракет наше КБ не проектировало, а заимствовало готовый, от королевской Р-11. Созданный на его основе макет длиной 10,5 м при диаметре 880 мм состоял из головной части, бака горючего, бака окислителя и хвостовой части. В головную часть мы установили 14-шлейфовый осциллограф, шесть гироскопических датчиков в плоскостях тангажа, рыскания и крена и три датчика перегрузок также в трех направлениях. Электрическая схема управления ракетой первоначально исключала всякую электронику, выглядела примитивно и состояла из нескольких реле, программного механизма и бортовой батареи. Все электрические моменты управления и датчики измерений, кроме осциллографа, применялись ранее смежными организациями и бьли опробованы ими в условиях полета летательных машин. Было неясно, как осциллограф поведет себя при морской качке и в полете. Но ничего лучшего не предлагалось, а осциллограф подкупал своей портативностью, хорошо вписывался в контур ракеты и не требовал специальной подготовки при его эксплуатации. Впоследствии мы все-таки отказались от «дедушки» и вняли па вооружение систему телеметрического контроля.
Баки для горючего и окислителя перед загрузкой ракеты в шахту заполнялись водой, чем достигалась расчетная масса ракеты и одновременно обеспечивалась прочность оболочек баков при действии на них глубинного давления воды. Хвостовая же часть изделия претерпела значительную переделку. Во-первых, взамен жидкостных РД (ЖРД) установили шесть ракетных двигателей твердого топлива, во-вторых, в центре между двигателями разместили пустотелую трубу – металлическое гнездо для грузового парашюта. Предполагалось, что парашют автоматически раскроется и ракета плавно спустится в воду. Но еще до осуществления первого старта ракеты от варианта с парашютом отказались, заменив его вариантом с тремя РД с отсекающим устройством, т. е. при выходе ракеты из воды лопасти указанного механизма разворачивались и перекрывали сопла работающих двигателей, отсекая горящую струю газов. Происходило торможение ракеты, и она, не набрав высоты, заваливаюсь».
Система управления, бортовая и корабельная (стендовая), разрабатывалась СКБ-626, сотрудниками В.А. Внутским, И.С. Игдаловой, И.И. Величко и другими.
На морском полигоне была оборудована техническая площадка – высокий, в четыре этажа, деревянный обитый шифером ангар со съемной крышей и одноэтажной пристройкой. Сооружение, имевшее ворота с выходом на бухту, стояло на обрезе пирса. Все держалось в секрете, и даже часовому, охранявшему этот объект, вход в него воспрещался.
Внутренний объем, как бы сказали сейчас, монтажно-испытательного корпуса делился дощатой перегородкой на две половины: пристройку и высокую коробку. В центре ее возвышался круглый сварной из стального профиля столик, жестко вмонтированный в монолит пирса. На плоскости столика крепился болтами хвостовой отсек ракеты, на который устанавливалась ее вертикальная сборка. Конструкция столика и крепежные болты были рассчитаны на удержание ракеты в случае самопроизвольного запуска РД.
Исследование параметров перехода ракет с подводной траектории на воздушную проводилось на макетах типа С-4, соответствовавших по всем наружным размерам и конфигурации ракетам Р-11ФМ. На базе этой ракеты были спроектированы два типа макетов: С-4 1 с ракетными двигателями на твердом топливе и С-4.5 с жидкостным двигателем (с заправкой топлива из расчета работы 4,5 с).
Испытания проводились вначале на макетах С-4.1. Образец для бросковых испытаний представлял собой макет боевой ракеты в натуральную величину со всеми действующими системами, элементами и системой управления, которые обеспечивали предстартовую подготовку, за пуск двигателя и движение в шахте стенда (или подводной лодки), при выходе из шахты, в воде, па переходном (вода-воздух) и начальном воздушном участках траектории. При этом проверялась работоспособность всех систем при давлениях, ударах, вибрации, ускорениях, воздействующих при за пуске двигателя в заполненной водой шахте и движении ракеты iici начальном участке траектории. Заодно отрабатывались системы погружаемого подводного стенда и контролировалось действие всех его устройств.